

Start SIM
First Sim of skid steering testing and learning the Sim environment.

Ackerman Steering
Second Sim with correct steering technique and steering behavior.

Suspension Behavior
3rd Sim Where Ackerman steering and Suspension system behavior are being portrayed.
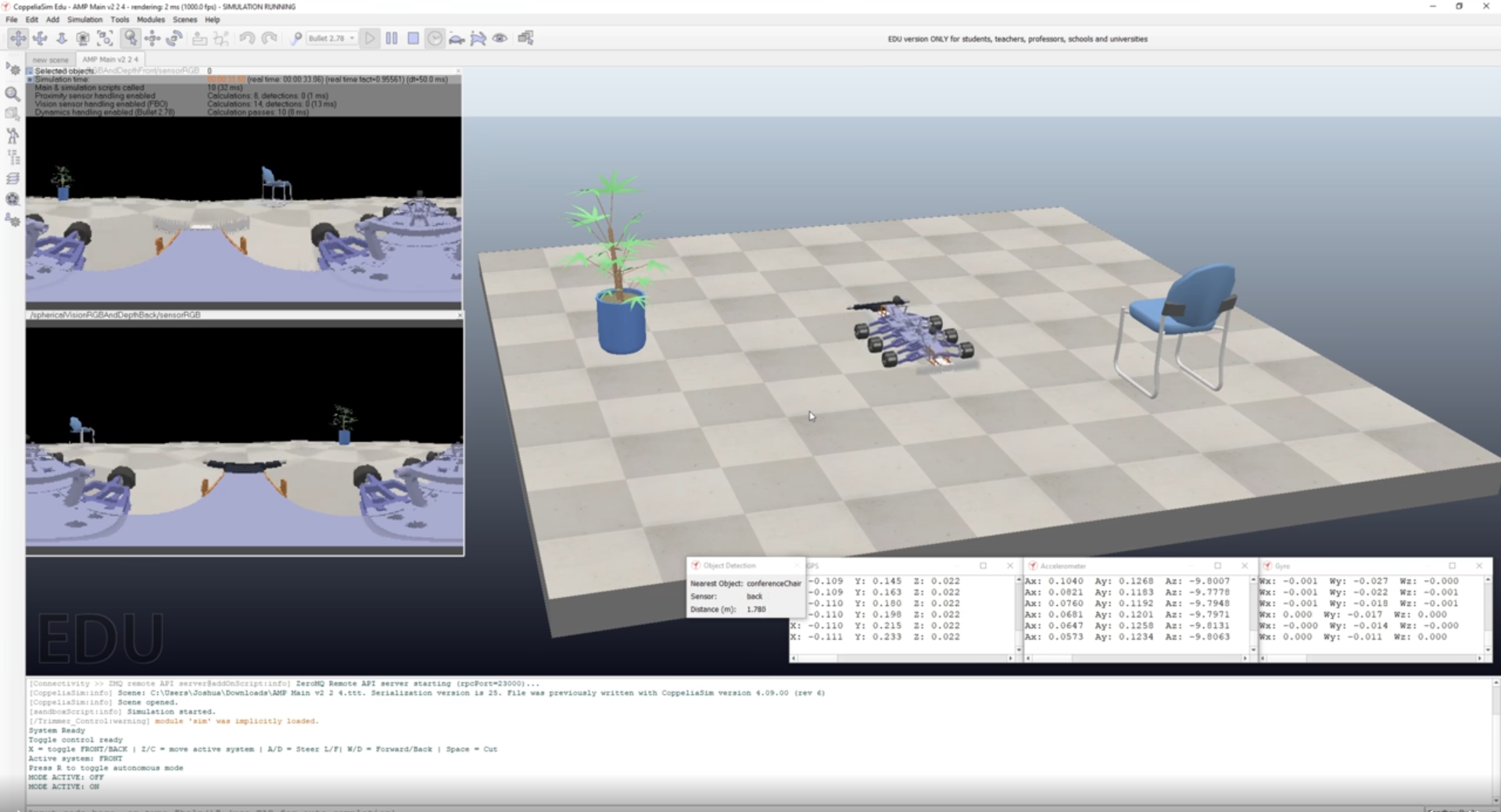
Low Level Autonomy
4th Sim displaying a low level obstacle avoidance behavior with positional data and object identification.